Access and Move a Robot Arm
Caution
Be careful when instructing robot arms to move. Before running any code, ensure your robotic arm has enough space and that there are no obstacles. Also pay attention to your surroundings, double-check your code for correctness, and make sure anyone nearby is aware and alert before issuing commands to your machine.
The following instructions show you how to interact with an arm component, help you understand how an arm describes its state, and assist you in issuing movement commands to your robotic arm.

Code examples in this tutorial use a UFACTORY xArm 6, but you can use any arm model.
If you do not have a robotic arm of your own, the fake arm component page shows how you can set up a virtual robotic arm with the same kinematic model as a real robotic arm.
Configure it with "arm-model": "xArm6" in its attributes.
You can then continue through the code examples in this tutorial without making any changes (and without needing to buy or build an expensive robot arm)!
The full tutorial code is available at the end of this page.
Prerequisites
Before starting this tutorial, make sure you have the Viam Python SDK or the Viam Go SDK installed.
If you are connecting to a real robotic arm during this tutorial, make sure your computer can communicate with the controller before continuing.
Configure a machine
Add a new machine in the Viam app.
Then follow the setup instructions to install viam-server on the computer you’re using for your project and connect to the Viam app.
Wait until your machine has successfully connected.
Once your machine is live, select the CONFIGURE tab.
Click on the + symbol next to your machine in the Builder panel and select Component in the menu that opens:
- Choose
armas the type. - Choose your desired model.
- For example, if you’re using an xArm 6, choose the
xArm6model from the list.
- For example, if you’re using an xArm 6, choose the
- Enter
myArmas the Name for this component, then click Create.
- Choose
In the newly created
myArmcomponent panel, configure any attributes as needed. Refer to the documentation for the model for information about your arm’s model.Switch to the Frame mode and select
myArmin the left-hand menu to see the default values for your arm. You do not need to change the default values that populate the new frame card.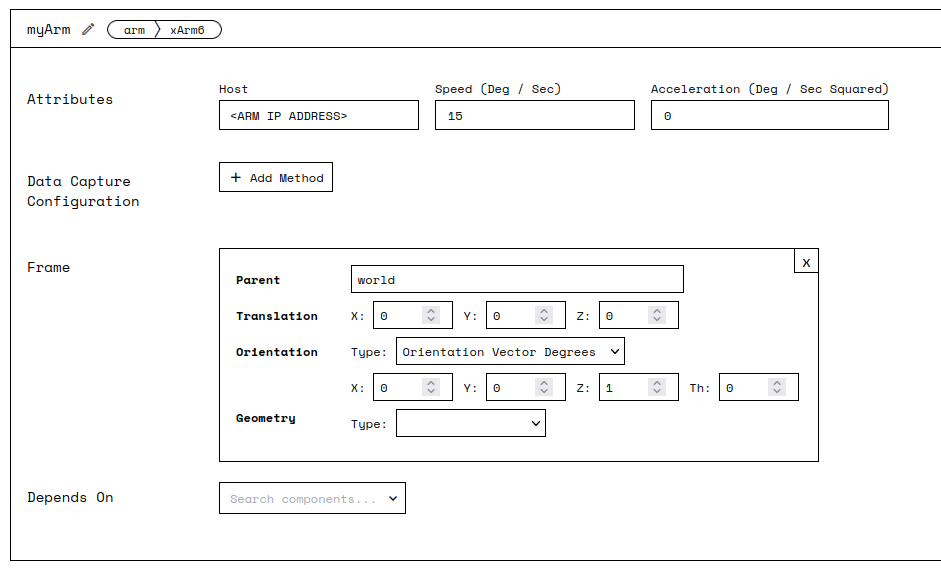
Save your machine configuration.
Go to the Code sample page of the CONNECT tab and select the programming language you are working in.
API key and API key ID
By default, the sample code does not include your machine API key and API key ID. We strongly recommend that you add your API key and API key ID as an environment variable and import this variable into your development environment as needed.
To show your machine’s API key and API key ID in the sample code, toggle Include secret on the CONNECT tab’s Code sample page.
Caution
Do not share your API key or machine address publicly. Sharing this information could compromise your system security by allowing unauthorized access to your machine, or to the computer running your machine.
Then, copy and paste the boilerplate code into a file and run the resulting script to verify you can connect to your machine. Throughout the rest of this tutorial, you will replace and amend this code. The full tutorial code is available at the bottom of this tutorial for reference.

Access the arm
The arm component library has several methods to simplify accessing and working with robotic arms.
In this step, you’ll fetch data about the robotic arm’s current position.
Your script will resemble the following lines from the full Python tutorial code which enable you to use the myArm component you configured earlier.
The code then calls the get_end_position method to get the position of the end of the robot arm with respect to the arm’s base.
# Access myArm
my_arm = Arm.from_robot(machine, "myArm")
# End Position of myArm
my_arm_return_value = await my_arm.get_end_position()
print(f"myArm get_end_position return value: {my_arm_return_value}")
You should see output that looks similar to the following:
myArm get_end_position return value: x: 200.73450755898915
y: 0.0028507667654201754
z: 108.63966593621173
o_x: -0.019650946400315308
o_y: -1.5485718223024914e-07
o_z: -0.99980690150926033
theta: -179.99979233107763
The x, y, and z values correspond to the position element of the pose, while the o_x, o_y, o_z, and theta values are for the orientation element of the pose (presented as an Orientation Vector).
Your script will resemble the following lines from the full Go tutorial code which enable you to use the myArm component you configured earlier.
The code then calls the EndPosition method to get the position of the end of the robot arm with respect to the arm’s base.
// Access myArm
myArmComponent, err := arm.FromRobot(machine, "myArm")
if err!=nil {
logger.Error(err)
return
}
// End Position of myArm
myArmReturnValue, err:= myArmComponent.EndPosition(context.Background(), map[string]interface{}{})
if err!=nil {
logger.Error(err)
return
}
logger.Infof("myArm EndPosition return value: %+v", myArmReturnValue)
You should see output that looks similar to the following:
myArm EndPosition position return value: (200.734507558989150766137755, 0.002850766765420175395673, 108.639665936211727625959611)
The Position value is part of a Pose.
The state of a robot arm can also be described as the combined positions of each joint attached to the arm. You can access a robot arm’s “joint states” (as they are sometimes referred to) by calling a different method on the arm component. Add the following code right after the code that gets the end effector pose from the prior code sample. When you run the code, you’ll see that these two pieces of information are presented differently.
# Joint Positions of myArm
my_arm_joint_positions = await my_arm.get_joint_positions()
print(f"myArm get_joint_positions return value: {my_arm_joint_positions}")
You should see output that looks similar to the following:
myArm get_joint_positions return value: values: 0.00043945314765093886
values: 0.46724854536551791
values: 0.64500731344456741
values: -0.00098876951707685271
values: 0.013732909913080547
values: 0.00076904296930648713
Each individual value corresponds to the current position of a particular joint on your robot. You can also see these values reflected on the Control tab in the Viam app for your robot arm.
// Joint Positions of myArm
myArmJointPositions, err := myArmComponent.JointPositions(context.Background(), nil)
if err != nil {
logger.Error(err)
return
}
logger.Infof("myArm JointPositions return value:", myArmJointPositions)
You should see output that looks similar to the following:
myArm JointPositions return value: values:0.00043945314765093886 values:0.4672485453655179 values:0.6450073134445674 values:-0.0009887695170768527 values:0.013732909913080547 values:0.0007690429693064871
Each individual value corresponds to the current position of a particular joint on your robot. You can also see these values reflected on the Control tab in the Viam app for your robot arm.
Both representations of an arm’s state are important. Sometimes you may wish to direct an arm in terms of joint positions. Other times you may need to describe the position of another object with respect to the end of the robot arm. There is a mathematical relationship that allows you to convert between these two representations, known as the forward and inverse kinematics, which is foundational to complex robotic motion. We will not cover forward and inverse kinematics in this tutorial, but resources for further reading on these topics are linked in the Next Steps section.
Move the arm
The two main options for specifying arm movement are through joint position commands and through pose commands. Let’s start with joint position commands, as their formulation is a little simpler.
Joint position commands
First, you can initiate motion with a joint position command. A final note:
Caution
Executing code presented after this point will induce motion in a connected robotic arm!
Add the following line to your import list to be able to assign values to a JointPositions data structure:
from viam.proto.component.arm import JointPositions
See the arm reference document for further details on how to structure data that you pass to the move_to_joint_positions function.
# Command a joint position move: move the forearm of the arm slightly up
cmd_joint_positions = JointPositions(values=[0, 0, -30.0, 0, 0, 0])
await my_arm.move_to_joint_positions(positions=cmd_joint_positions)
You must import an additional Go library to access the data structure that Viam uses to encode joint positions, which is shown next.
Add armapi "go.viam.com/api/component/arm/v1" to your import list to be able to assign values to an armapi.JointPositions data structure.
See the arm reference document for further details on how to structure data that you pass to the MoveToJointPositions function.
// Command a joint position move: move the forearm of the arm slightly up
cmdJointPositions := &armapi.JointPositions{Values: []float64{0.0, 0.0, -30.0, 0.0, 0.0, 0.0}}
err = myArmComponent.MoveToJointPositions(context.Background(), cmdJointPositions, nil)
if err != nil {
logger.Error(err)
return
}
If you execute the sample joint move statement above, the third joint of your arm should move a small amount (30 degrees). Feel free to experiment further with joint position commands by changing the values for each joint and re-sending the commands.
When you are ready to move on, the next section will show you how to use pose commands.
Pose commands
When you got the end position of the arm, this data was returned in the format of a Pose.
The returned Pose is a combination of position and orientation data that indicates the end of the arm’s full 6-dimensional configuration in space.
The following code sample reuses the methods to get the pose of the end of the arm so that you can make small adjustments at will. You can then pass the adjusted pose back to the arm as a goal pose for the purposes of starting motion. For example, the following code gets the arm’s end position, makes a 100 millimeter adjustment in the +Z direction, and then uses that adjustment as a goal when commanding arm motion.
Add the sample code below to your own client script to try using the arm component’s move_to_position command.
This example gets a Pose from get_end_position() so no additional imports are required.
If you want to synthesize new poses directly, note that you must import an additional Python package by adding from viam.proto.common import Pose to your import list.
# Generate a simple pose move +100mm in the +Z direction of the arm
cmd_arm_pose = await my_arm.get_end_position()
cmd_arm_pose.z += 100.0
await my_arm.move_to_position(pose=cmd_arm_pose)
You must import some additional Go packages to synthesize new poses through the spatialmath library for the arms’s MoveToPosition command.
Add "go.viam.com/rdk/referenceframe" and "go.viam.com/rdk/spatialmath" to your import list and then add the sample code below to your own client script.
// Generate a simple pose move +100mm in the +Z direction of the arm
currentArmPose, err := myArmComponent.EndPosition(context.Background(), nil)
if err != nil {
logger.Error(err)
return
}
adjustedArmPoint := currentArmPose.Point()
adjustedArmPoint.Z += 100.0
cmdArmPose := spatialmath.NewPose(adjustedArmPoint, currentArmPose.Orientation())
err = myArmComponent.MoveToPosition(context.Background(), cmdArmPose, nil)
if err != nil {
logger.Error(err)
return
}
Using this code you can quickly adjust one or more elements of position AND orientation simultaneously, by modifying other elements of the original arm pose.
For all motion actions taken in this tutorial, there may be joint positions or poses that are unreachable for particular reasons (potential collisions, a pose in space is unreachable because the arm is too short).
Regularly check your client script’s feedback and the viam-server logs for any issues that may arise.
Next steps and references
If you would like to continue onto working with Viam’s motion service, check out one of these tutorials:
You can also ask questions in the Community Discord and we will be happy to help.
For more resources on robot kinematics, read through the Wikipedia pages for Forward kinematics and Inverse kinematics.
Full tutorial code
import asyncio
from viam.components.arm import Arm
from viam.proto.component.arm import JointPositions
from viam.robot.client import RobotClient
from viam.rpc.dial import Credentials, DialOptions
async def connect():
opts = RobotClient.Options.with_api_key(
# Replace "<API-KEY>" (including brackets) with your machine's API key
api_key='<API-KEY>',
# Replace "<API-KEY-ID>" (including brackets) with your machine's API key
# ID
api_key_id='<API-KEY-ID>'
)
return await RobotClient.at_address('ADDRESS FROM THE VIAM APP', opts)
async def main():
machine = await connect()
print('Resources:')
print(machine.resource_names)
# Access myArm
my_arm = Arm.from_robot(machine, "myArm")
# End Position of myArm
my_arm_end_position = await my_arm.get_end_position()
print(f"myArm get_end_position return value: {my_arm_end_position}")
# Joint Positions of myArm
my_arm_joint_positions = await my_arm.get_joint_positions()
print(f"myArm get_joint_positions return value: {my_arm_joint_positions}")
# Command a joint position move: small adjustment to the last joint
cmd_joint_positions = JointPositions(values=[0, 0, 0, 0, 0, 15.0])
await my_arm.move_to_joint_positions(
positions=cmd_joint_positions)
# Generate a simple pose move +100mm in the +Z direction of the arm
cmd_arm_pose = await my_arm.get_end_position()
cmd_arm_pose.z += 100.0
await my_arm.move_to_position(pose=cmd_arm_pose)
# Don't forget to close the robot when you're done!
await machine.close()
if __name__ == '__main__':
asyncio.run(main())
API key and API key ID
By default, the sample code does not include your machine API key and API key ID. We strongly recommend that you add your API key and API key ID as an environment variable and import this variable into your development environment as needed.
To show your machine’s API key and API key ID in the sample code, toggle Include secret on the CONNECT tab’s Code sample page.
Caution
Do not share your API key or machine address publicly. Sharing this information could compromise your system security by allowing unauthorized access to your machine, or to the computer running your machine.
package main
import (
"context"
armapi "go.viam.com/api/component/arm/v1"
"go.viam.com/rdk/logging"
"go.viam.com/rdk/robot/client"
"go.viam.com/rdk/components/arm"
"go.viam.com/rdk/referenceframe"
"go.viam.com/rdk/spatialmath"
"go.viam.com/rdk/utils"
)
func main() {
logger := logging.NewLogger("client")
machine, err := client.New(
context.Background(),
"ADDRESS FROM THE VIAM APP",
logger,
client.WithDialOptions(utils.WithEntityCredentials(
// Replace "<API-KEY-ID>" (including brackets) with your machine's API key ID
"<API-KEY-ID>",
utils.Credentials{
Type: utils.CredentialsTypeAPIKey,
// Replace "<API-KEY>" (including brackets) with your machine's API key
Payload: "<API-KEY>",
})),
)
if err != nil {
logger.Fatal(err)
}
defer machine.Close(context.Background())
logger.Info("Resources:")
logger.Info(machine.ResourceNames())
// Access myArm
myArmComponent, err := arm.FromRobot(machine, "myArm")
if err != nil {
logger.Error(err)
return
}
// End Position of myArm
myArmReturnValue, err := myArmComponent.EndPosition(context.Background(), nil)
if err != nil {
logger.Error(err)
return
}
logger.Infof("myArm EndPosition return value: %+v", myArmReturnValue)
// Joint Positions of myArm
myArmJointPositions, err := myArmComponent.JointPositions(context.Background(), nil)
if err != nil {
logger.Error(err)
return
}
logger.Infof("myArm JointPositions return value:", myArmJointPositions)
// Command a joint position move: small adjustment to the last joint
cmdJointPositions := &armapi.JointPositions{Values: []float64{0.0, 0.0, 0.0, 0.0, 0.0, 15.0}}
err = myArmComponent.MoveToJointPositions(context.Background(), cmdJointPositions, nil)
if err != nil {
logger.Error(err)
return
}
// Generate a simple pose move +100mm in the +Z direction of the arm
currentArmPose, err := myArmComponent.EndPosition(context.Background(), nil)
if err != nil {
logger.Error(err)
return
}
adjustedArmPoint := currentArmPose.Point()
adjustedArmPoint.Z += 100.0
cmdArmPose := spatialmath.NewPose(adjustedArmPoint, currentArmPose.Orientation())
err = myArmComponent.MoveToPosition(context.Background(), cmdArmPose, nil)
if err != nil {
logger.Error(err)
return
}
}
API key and API key ID
By default, the sample code does not include your machine API key and API key ID. We strongly recommend that you add your API key and API key ID as an environment variable and import this variable into your development environment as needed.
To show your machine’s API key and API key ID in the sample code, toggle Include secret on the CONNECT tab’s Code sample page.
Caution
Do not share your API key or machine address publicly. Sharing this information could compromise your system security by allowing unauthorized access to your machine, or to the computer running your machine.
Was this page helpful?
Glad to hear it! If you have any other feedback please let us know:
We're sorry about that. To help us improve, please tell us what we can do better:
Thank you!