Navigate with a Rover Base
The navigation service allows you to queue up user-defined waypoints for your machine to move to in the order that you specify. You can also add obstacles or set linear and angular velocity targets in your navigation service config. Viam’s motion planner will plan routes that avoid those obstacles and attempt to keep the robot at your specified velocity.
Learning Goals
After following this tutorial, you will be able to:
- add waypoints to specify locations you want your machine to move to, both in the app and programmatically
- use the navigation service to move your machine along those waypoints
To try it out yourself, you need a mobile base and a movement sensor that can track the robot’s GPS coordinates and angular and linear velocity. Follow this tutorial to get started using Viam’s Navigation service to help your wheeled base navigate across space with our recommended stack.
Requirements
A base
We used a LEO rover, configured as a
wheeledbase, but you can use whatever model of rover base you have on hand:
A movement sensor with GPS position, compass heading, and angular and linear velocity readings
We used three movement sensors to satisfy these requirements:
- A SparkFun GPS-RTK-SMA Breakout movement sensor configured as a
gps-nmea-rtk-serialmodel, providing GPS position and compass heading measurements. - A
wheeled-odometrymodel gathering angular and linear velocity information from the encoders wired to our base’s motors. - A
mergedmodel aggregating the readings together for the navigation service to consume.
You can use any combo of movement sensors you want as long as you are getting all the types of measurements required. See the navigation service for more info on movement sensor requirements.
- A SparkFun GPS-RTK-SMA Breakout movement sensor configured as a

Tip
If you are using different hardware, the navigation setup process will be mostly the same, but you will need to substitute your robot’s components.
Before you start, make sure to create a machine on Viam and install viam-server on your robot.
Also, make sure to physically connect your components together to your machine’s computer and power it on.
Configure the components you need
First, configure the components of your robot.
If you are using different hardware, configure them according to the instructions for the component model that supports your hardware. First, configure the board local to your rover.
Follow these instructions to configure your board model.
We used a Configure your rover base to act as the moving platform of the navigating robot.
Start by configuring the encoders and motors of your encoded motor. Follow the encoder configuration instructions to configure the left and right encoders of the wheeled base.
We configured ours as Assign the pins as the digital interrupts you configured for the board, and wire the encoders accordingly to pins numbered Next, follow these instructions to configure the left and right motors of the Wire the motors accordingly to the GPIO pins numbered Finally, configure whatever rover you have as a Make sure to select each of your right and left motors as right and left, as well as set the wheel_circumference_mm and width_mm of each of the wheels the motors are attached to. Configure the frame system for this wheeled base so that the navigation service knows where it is in relation to the movement sensor. Switch to Frame mode on the CONFIGURE tab and select your base.
If your movement sensor is mounted on top of the rover like ours is, set Orientation’s third input field, Z, to Select the Refer to the Be sure to wire the board to the encoders and motors on your base matching this configuration.
If you choose to wire your components differently, adjust your pin assignment configuration from these instructions according to your wiring.
Click to see how we configured our LEO rover
Configure a board with
"digital_interrupts"jetson board, but you can use any model of board you have on hand, as the resource’s API is hardware agnostic.local as shown below:
31, 29, 23, and 21:
{
"digital_interrupts": [
{
"name": "ra",
"pin": "31"
},
{
"pin": "29",
"name": "rb"
},
{
"pin": "23",
"name": "lb"
},
{
"name": "la",
"pin": "21"
}
]
}
Configure a rover base with encoded motors
incremental encoders, as shown below:

31, 29, 23, and 21 on your local board.
Refer to the incremental encoder documentation for attribute information.wheeled base.
We configured ours as gpio motors, as shown below:

35, 35, 15, 38, 40, and 33 on your local board.
Refer to the gpio motor documentation for attribute information.wheeled model of base, bringing the motion produced by these motors together on one platform:
1 and its fourth input field, theta, to 90.world as the parent frame.
wheeled base configuration instructions for attribute information.Tip
Configure movement sensors
Configure a GPS movement sensor so the robot knows where it is while navigating. We configured ours as a
gps-nmea-rtk-serialmovement sensor: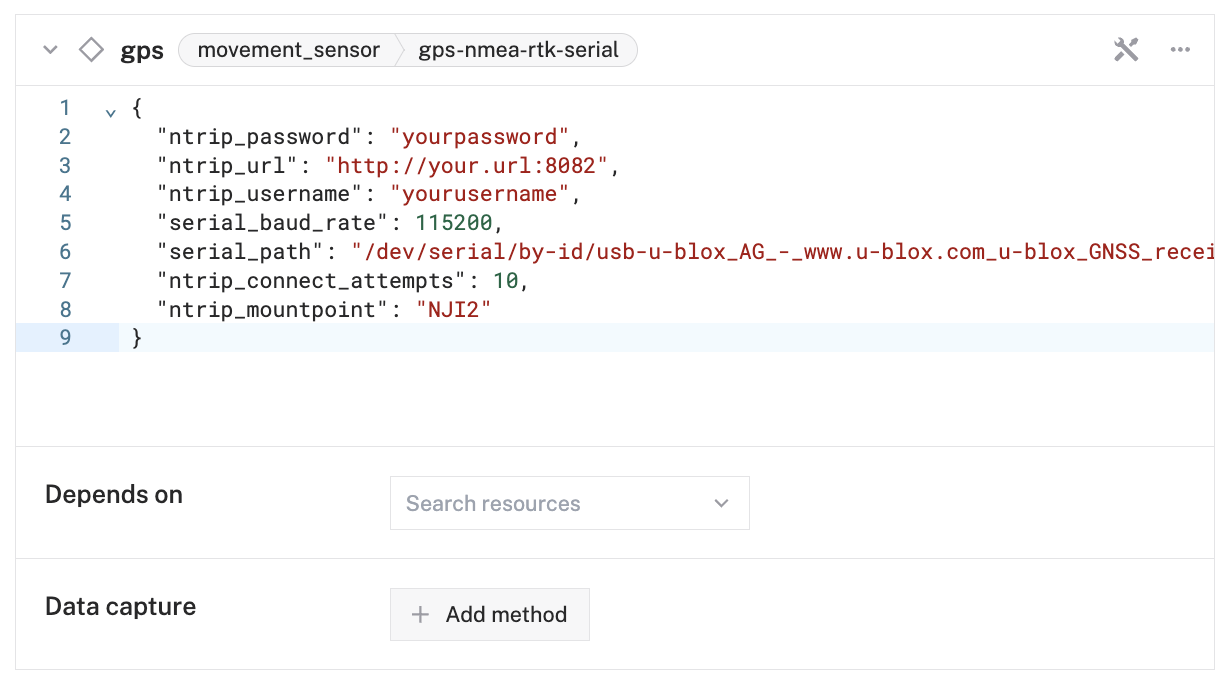
We named ours
gps. Refer to thegps-nmea-rtk-serialmovement sensor documentation for attribute information.Configure a wheeled odometry movement sensor to provide angular and linear velocity measurements from the encoded motors on our base.
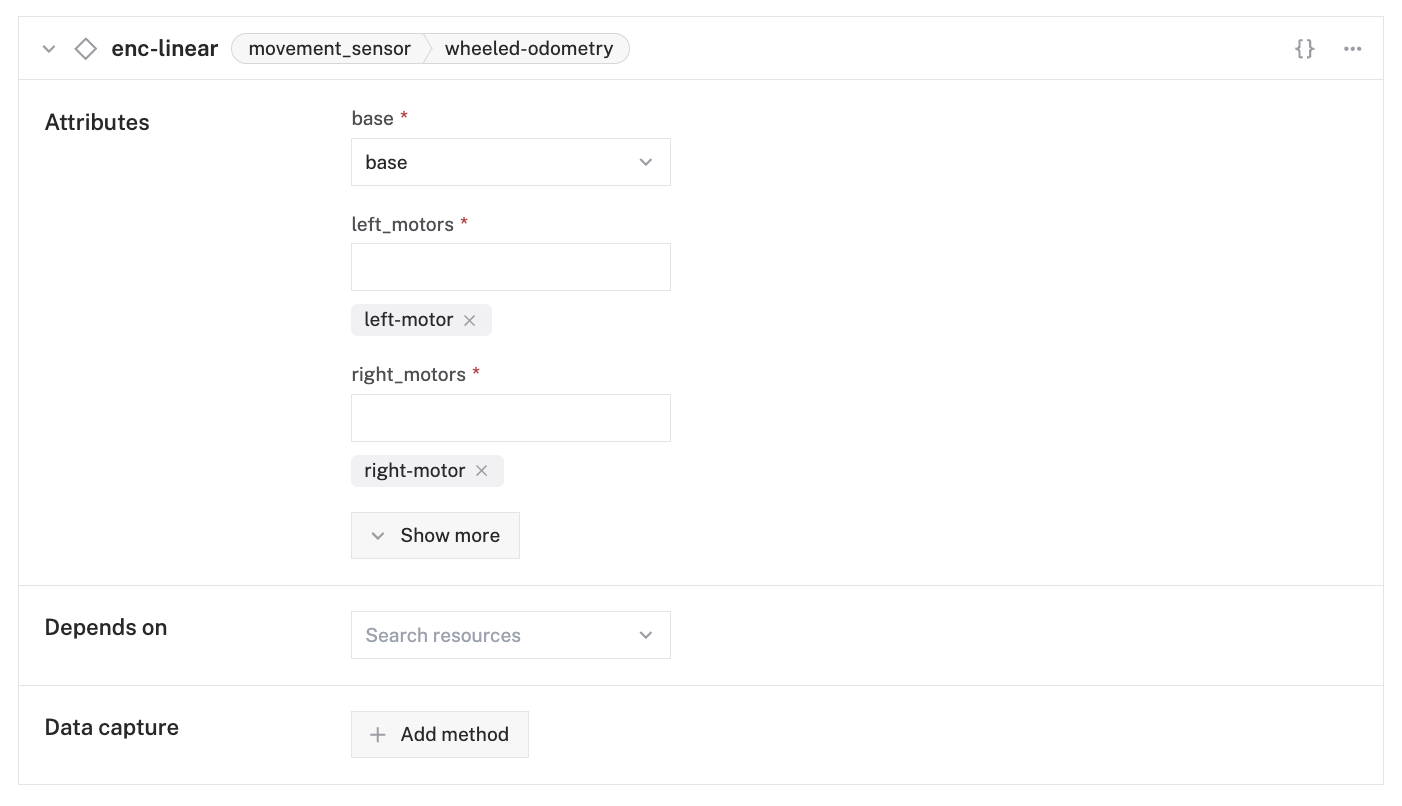
We named ours
enc-linear. Refer to thewheeled-odometrymovement sensor documentation for attribute information.Now that you’ve got movement sensors which can give you GPS position and linear and angular velocity readings, configure a
mergedmovement sensor to aggregate the readings from our other movement sensors into a singular sensor: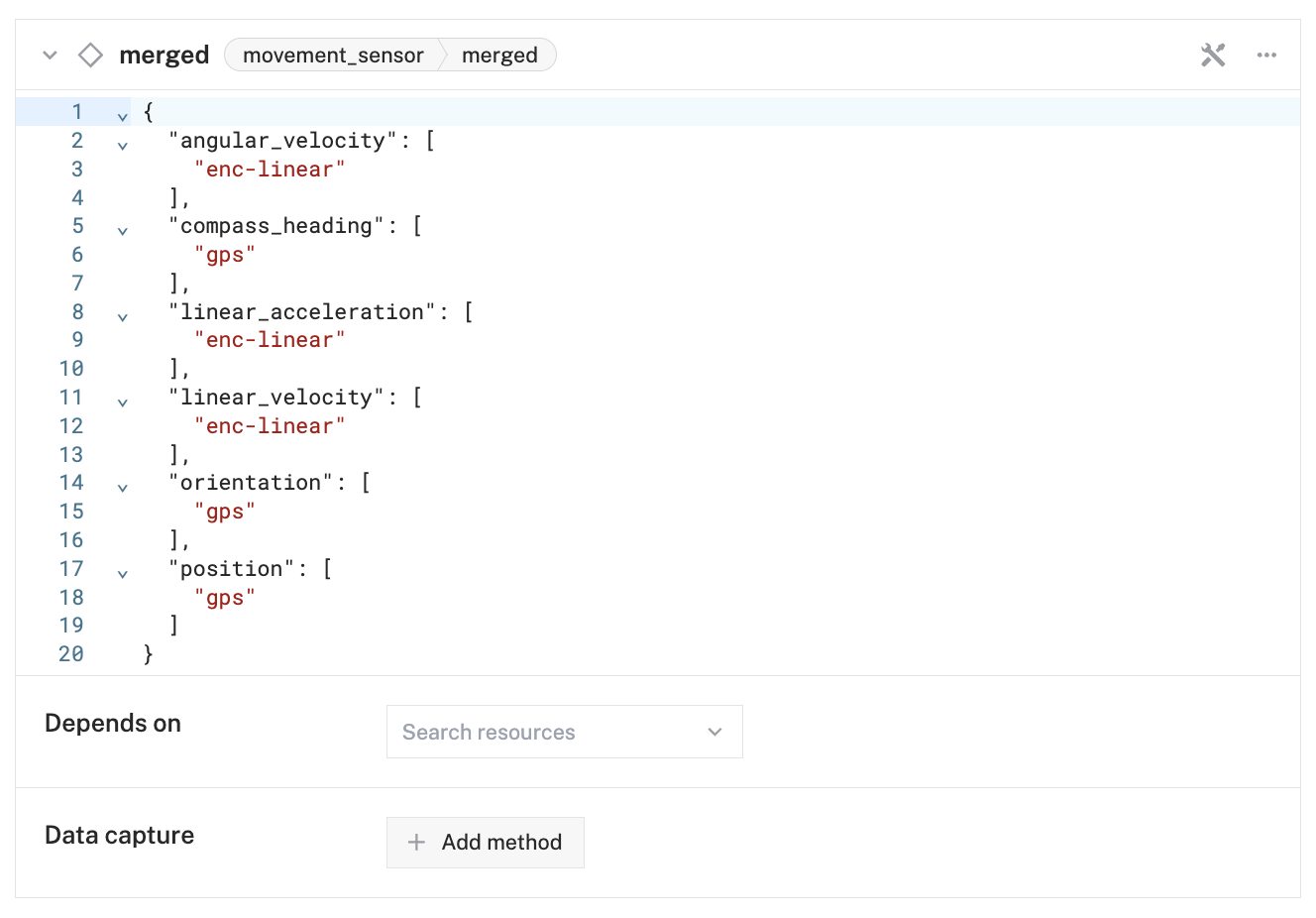
We named ours
merged. Refer to themergedmovement sensor documentation for attribute information.Make sure your
mergedmovement sensor is configured to gather"position"readings from thegpsmovement sensor.Configure the frame system for this movement sensor so that the navigation service knows where it is in relation to the base.
- On the CONFIGURE tab, add a frame to your movement sensor configuration by clicking + Add Frame. If your movement sensor is mounted on top of the rover like ours is, leave the default frame values.
- Set the
baseas theparentframe.



Configure a navigation service
Add the navigation service so that your wheeled base can navigate between waypoints and avoid obstacles. To add the navigation service to your robot, do the following:
Navigate to the CONFIGURE tab of your machine’s page.
Click the + icon next to your machine part in the left-hand menu and select Component or service.
Select the
navigationtype.Enter a name or use the suggested name for your service and click Create.
Select JSON mode. Copy and paste the following into your new service’s attributes field:
{ "base": "base", "movement_sensor": "merged", "obstacles": [], "store": { "type": "memory" }, "position_polling_frequency": 2, "meters_per_sec": 1.2, "degs_per_sec": 90, "plan_deviation_m": 0.25 }Edit the attributes as applicable. Attribute information is available in the navigation service documentation.
Click Save in the top right corner of the screen to save your changes.
Your navigation service should now appear in your machine’s CONFIGURE tab as a card with a map like the following:

For more detailed information see the navigation service.
Start navigating with the navigation service
Now that you have configured your navigation service, add waypoints to your navigation service. You can add waypoints from the CONTROL tab or programmatically.
Control tab method
Go to the CONTROL tab of your machine, and open the navigation service card.
From there, ensure that Navigation mode is selected as Manual, so your robot will not begin navigation while you add waypoints.
Add waypoints
Select Waypoints on the upper-left corner menu of the navigation card. Zoom in on your current location and click on the map to add a waypoint.

Add as many waypoints as you desire. Hover over a waypoint in the left-hand menu and click the trash icon to delete a waypoint.

(Optional) Add obstacles
If you want your robot to avoid certain obstacles in its path while navigating, you can also add obstacles. In the CONFIGURE tab, select the Obstacles subtab on the navigation card. Zoom in on your current location, then hold shift and drag on the map to draw an obstacle. Add as many obstacles as you desire. Hover over an obstacle in the left-hand menu and click the trash icon to delete an obstacle.
Begin navigation
Toggle Navigation mode to Waypoint. Your rover will begin navigating between waypoints.
Programmatic method
If you want to do add waypoints programmatically, use the service’s API method AddWaypoint():
Add waypoints
Begin navigation
To start navigating, set your service to MODE_WAYPOINT with the service’s API method SetMode():
Next steps: automate obstacle detection
In this tutorial, you have learned how to use Navigation to navigate across waypoints. Now, you can make navigation even better with automated obstacle detection.
First, configure a depth camera that your robot can sense how far away it is from obstacles.
We configured ours as an Intel RealSense Camera, which is available as a modular resource in the registry:

Tip
You can alternatively use viam:ultrasonic:camera from the official viam module.
If you want the robot to be able to automatically detect obstacles in front of it, configure a Vision service segmenter.
For example, configure the Vision service model obstacles_depth to detect obstacles in front of the robot.
Then, use one of Viam’s client SDKs to automate obstacle avoidance with the navigation service like in the following Python program:
You can also ask questions in the Community Discord and we will be happy to help.
Was this page helpful?
Glad to hear it! If you have any other feedback please let us know:
We're sorry about that. To help us improve, please tell us what we can do better:
Thank you!